
2022年12月22日-23日,GTM2022全球科技出行峰会在上海成功召开,探维科技CEO王世玮受邀参加此次活动并发表《突围自动驾驶感知困局》主题演讲。

以下是演讲的精华观点提炼,在此分享,欢迎大家一起讨论。
让激光雷达核心价值被看见,我们和车企一起努力
借用哲学家的一句话,能者达人所不达,智者达人所未见,最近一段时间大家一直在关注的如何能够做到产品的量产交付,如何看到激光雷达在自动驾驶和辅助驾驶中的功能应用,也就是激光雷达的核心价值。今年探维非常有幸,成为国内第四家拿到乘用车量产项目定点的初创公司。我们在今年年初开启了跟广汽合创的合作,到今年下半年也顺利敲定了在三款量产车型上车的定点,明年进入SOP的状态。在今年年底的广州车展上合创汽车会发布我们合作的新车型,也是业内第一款搭载激光雷达的MPV车型,希望大家能够关注到我们跟客户一起朝前推进取得的成绩。
困境中的思考,激光雷达3.0的核心原则
近两年激光雷达上车如雨后春笋蓬勃发展,如何在保证产品高性能的同时,做到真正车规级和低成本的量产,探维也有自己的考虑,我们在自研的ALS平台下,不断迭代兼顾三者的激光雷达产品。
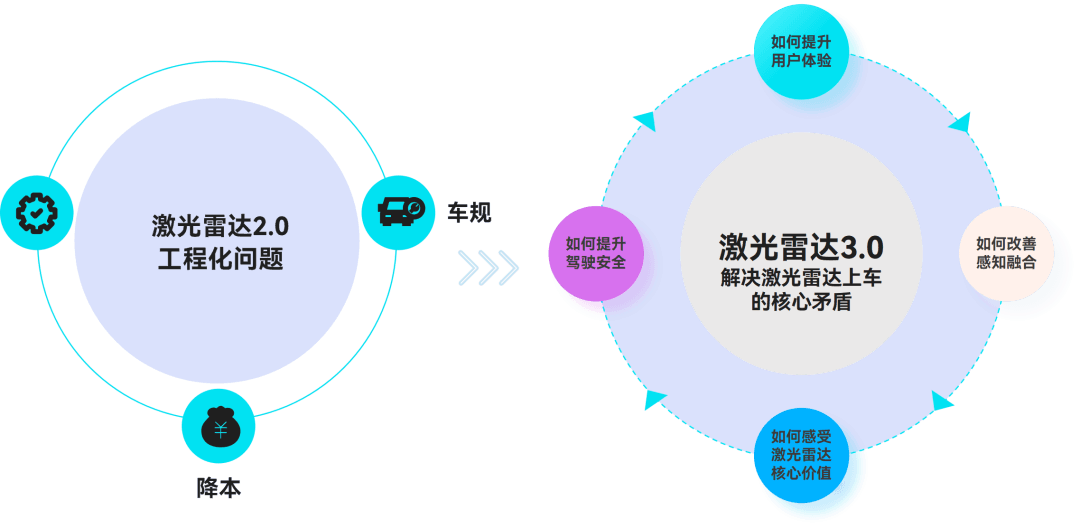
我们看到行业内的核心矛盾的转移,激光雷达2.0解决的核心是工程问题,而3.0时代,我们更关注客户真正使用激光雷达带来的价值和体验,如何解决激光雷达上车应用的矛盾,如何提升用户的驾乘体验,如何提升产品的安全性,如何形成一套一体化的深度融合感知系统,这是我们认为激光雷达下一代要解决的问题,也是激光雷达3.0概念的核心原则。
激光雷达3.0的融合怎么落地
激光雷达3.0核心最关键的是融合,目前行业内以目标级的后融合为主,面临融合进度低,信息损失比较高的问题。对此,我们觉得行业会朝着前融合发展,作为硬件的传感器供应商,我们的目标是提供一套更完美的核心技术和前沿产品。
未来我们做的事情就是硬件级的图像前融合,通过一套传感器,实现高精度的时间同步和空间对准,可以做到点点对应的前融合关系,这是探维所提供的Fusion给用户带来的不一样的地方。
3.0时代的Fusion外观上跟传统激光雷达没有任何的区别,内置有CMOS和激光器,我们第一代的Demo是64线的激光点云,加上800万像素的图像传感器,同时采集视频图像和激光点云,客户可以拿去直接跑前融合的架构,也可以借助一些后融合的框架实现更好的融合效果,通过系统集成上不同方式,大幅节省硬件成本和标定的成本,保证融合进度。
从客户需求出发打造主雷达ALS架构
在低成本车规级激光雷达产品上我们提出了基于单轴扫描的方案,采用了水平方向扫描,阵列化的激光收发,以及自主的TOF芯片的方式,去搭建整个固态框架下的前向主雷达架构。我们也是本着客户的真实需求出发,同时考虑提升稳定性、降低成本、保证高性能高线束的设计思路打造我们的硬件架构。
目前探维有两款车规级的产品,Tempo是行业内905波段应该是最高线束的车规级激光雷达产品,极限探测距离超过了300米,满足量产装车对于体积、功耗和尺寸的要求。
同时我们也拥有一款经过更加精细化设计的Duetto产品,硬件级的ROI配置,中心区域0.15度的角度分辨率,两侧60度以外,配置了0.4度的角度分辨率和200米的感知距离,在ADAS场景下优化激光雷达核心性能分布,在性价比层面做到最优。
伴随着峰会落幕,亿欧汽车“2022中国科技出行产业青年创新者TOP10榜单”正式发布,探维科技CEO王世玮作为科技出行产业的中坚力量成功入选。

同时,随着智能电动汽车的高速发展,探维科技加速创新,在技术迭代、订单落地、多点布局等多方面做出突破,成功入选“2022中国科技出行产业最具投资价值企业TOP10榜单”。

未来探维科技将在科技出行领域砥砺创新,让激光雷达的核心价值被看见,开启感知融合技术革命,与客户共同打造极致安全的智能驾驶感知系统。



