
2021年以来,随着高性能车规级激光雷达在成本、性能、可靠性等方面基本成熟,激光雷达的市场认知和应用规模迎来新一轮爆发。
如何定义激光雷达“3.0时代”?
激光雷达赛道一直充满迷雾,不同技术路径各有优势劣势,如何破局而出?
激光雷达的终局是什么,是成本、性能和稳定性的极致平衡吗?
探维科技CEO王世玮受邀参加数字科技百日谈,畅谈他的看法。
▶主题:激光雷达“3.0时代”来临了吗?
▶人物:探维科技CEO王世玮
Question 01:激光雷达技术从国内外的研究到应用,有演进的脉络和动向,请您帮助大家理解和刻画一下所谓的1.0、2.0、3.0。
借此机会,我们把激光雷达3.0的概念给大家做一个介绍。首先,激光的飞行时间测距技术(TOF)是光学领域比较常见、基础的技术方案。最早阿波罗飞船登月,测量地球到月球的距离,就是通过计算光在太空中飞行的时间得到精确的距离信息,当时还不能叫做激光雷达。
我们所看到的激光雷达产品的1.0,就是大家经常说的机械式激光雷达。最早我们看到的机械式激光雷达安装在自动驾驶测试车的车顶,做360度环视,一边旋转扫描,一边采集点云,承担无人驾驶车的感知功能,性能很好,测距很远,3D感知的场景非常清晰,开创了激光雷达在自动驾驶系统和车载端的应用,这是机械式激光雷达的历史使命。所谓2.0技术,就是大家经常说的车规级激光雷达,随着自动驾驶技术从ADAS升级到L2+,甚至L3、L4,激光雷达想要上量产的乘用车和商务车,所面对的核心问题就是要走向固态化、低成本和车规级。目前国内外已经发布了一些搭载激光雷达的量产乘用车车型,激光雷达开始走入消费者的视野,为车辆提供高级辅助驾驶所需的感知功能。
我们总结归纳激光雷达2.0的版本,跟1.0最大的差别就是从机械式走向了固态,或者说混合固态,其中包含很多技术路线。技术路线虽然不同,但都是为了量产,为了能够满足车规级的要求。我们看行业的发展趋势,一个非常明确的刚需就是安全。激光雷达满足车规级的要求以后,一定要保证自动驾驶系统从感知层再到决策层都能够更加安全可靠,在更多的场景下,让自动驾驶系统去发挥它的无人驾驶功能。
在传感器端如何更好地提升感知性能,就是我们在推广的概念,或者说是我们对未来的判断。后面激光雷达一定是和更多的传感器去融合,图像加上激光点云,能够以光学和基于硬件的形式去做到高精度的空间对准,高精度的时间同步,通过前融合的方式把摄像头和激光雷达的数据,真正地整合到一起来。这就是我们看到的未来整个感知层技术演进方向和趋势。
所以我们激光雷达3.0的概念,就是硬件级图像前融合的固态激光雷达,能够同时给用户、给算法层去输出具有高清细节的图像信息,同时也能给出非常高精度的距离3D感知的信息,这个就是我们所定义的激光雷达3.0的概念和技术的方向。
Question 02:在激光雷达上车的过程中,客户现阶段对于激光雷达有什么样具体的需求?在上车的过程当中到底有什么样的痛点?在这个过程当中探维这样的创业公司有什么样的机遇?
这个问题还挺大,我觉得这个问题还是得从激光雷达2.0车规量产的应用普及开始聊。因为ADAS系统,或者说是L2+、L3的自动驾驶系统,可能会遇到一些事故的隐患和出现一些意外的情况,总结下来看,目前出现的大部分场景和失效的模式,还没有因为激光雷达的原因导致的。绝大部分的失效,还是摄像头加上毫米波的感知方案在一些corner case下遇到意外情况导致。
目前整个行业内,激光雷达量产车型进ADAS系统,是一个逐渐普及的过程。可以看到很多车企都已经有了激光雷达车型的计划,但是目前搭载激光雷达自动驾驶系统的车型普及率还不是特别高。大家可能还在行业内共同探讨激光雷达究竟上车要发挥什么作用,如何跟摄像头、毫米波这样相对比较成熟的感知传感器去配合、融合。
所以这个问题既涉及到激光雷达上车的大趋势,同时也涉及到不同传感器之间,如何去更好地互相配合,能更完善地、更完整性地保证自动驾驶系统在更多的场景下,做到极致的安全体验。我们在激光雷达2.0版本的阶段下,给很多车载的乘用车客户去提供更低成本、更加可靠,环境稳定性更好的固态激光雷达产品,进一步推动在当下的ADAS系统中,车企能够有更多更好的传感器选择。我们所看到的这些corner case的共同点基本都是属于道路上遇到静态物体的情况,这是毫米波没有办法解决的。同时,如果障碍物或者说一些特殊的车辆,它在图像当中所展现的形态并不是常见的障碍物,图像识别失效的风险也非常大。所以类似这样的场景,对于摄像头加毫米波的感知系统而言,失效的风险是非常高的。

然而,激光雷达最擅长的就是对于异形或大型物体的感知,哪怕它是静态的,激光雷达点云都是可以在相当远的距离下,甚至150米、200米外就能够做到检测和识别。当然目前激光雷达在上车的过程当中也遇到一些困难和挑战,我觉得主要来自于两个方面,一方面是激光雷达的成本一定要达到入门型的,或者大众型的车型能接受的价格。另外一方面,在传感器融合的层面,不要让不同的传感器互相掣肘。所以探维做的事情一方面在激光雷达的方案上,充分考虑低成本和车规级的要求。我们的ALS方案,非常适合规模化的车规级量产,而且最终的目标成本,能够做到接近千元级的水平,满足未来自动驾驶车型对于激光雷达终极成本的一个要求。
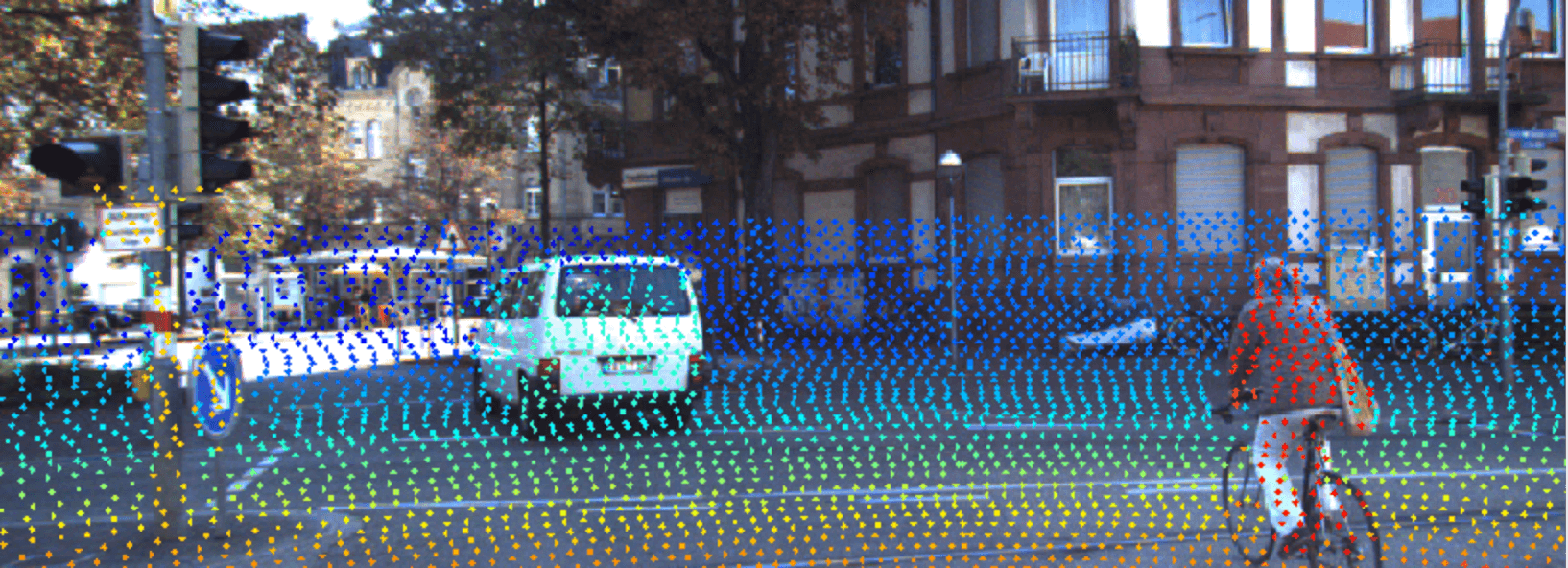
同时,我们也在做激光雷达3.0的方案——硬件级图像前融合。我们能够在最原始数据Raw data的层面,直接把摄像头的信息和激光点云的信息做深度的整合,让算法不再是独立去处理激光雷达的数据和摄像头的数据,而是同步处理,直接采用前融合的感知算法、感知架构。这样的话,我们在后面整车传感器融合集成的过程当中,就不太需要去考虑究竟该采信摄像头,还是该采信激光雷达。因为两者的原始数据其实是一同进到决策系统当中来的,而且两者的标定关系,对应关系,还有时空同步的一些问题,都会在我们前融合的方式当中去得到完美的解决。这其实也是在低成本的前提下,一举解决了多传感器系统中,不同传感器的特性如何互相融合的工程难题。
Question 03:对于激光雷达这种产品,您接触到的真实客户更看重哪一点,是不是有一个排序?
我们去年在行业里提出了一个不可能三角的概念,其实就是性能、成本和车规级的环境稳定性。在一定情况下同时做到最优确实难度很高,需要突破技术的瓶颈。但是,这三点不管是终端用户、OEM厂商,还是自动驾驶方案开发商来看,都是需要去兼顾的。
既然是量产车型,量产的场景一定是车规级的。在大规模量产的情况下,成本要做到最终的终端用户能够接受的水平。其中性能可以做一些转化,因为本身性能更核心的还是要去满足安全、满足功能。如果说直接去讨论这三者有没有排序,有没有取舍,我觉得其实是没有的,因为都很重要。
我们去实现这个不可能的三角,是希望助力激光雷达市场和自动驾驶赛道能够达到市场的预期,共同把市场做的越来越大,普及率越来越高。当然,这是宏观层面的,具体到每一个场景下,其实很重要的一件事情就是去做需求分析。不管是低速的L4还是高速的乘用车ADAS的场景,我们目前在跟客户一起合作过程当中,一个非常宝贵的价值就在于如何把激光雷达这个产品定义好。
并不像早些年,大家在比拼产品参数,这不是根本性的需求。最重要的还是一起去跟客户去定义产品、定义功能,我们究竟在什么样的ADAS或者是L4的场景下需要多高的分辨率,多远的探测距离,这个一定是有科学而且是合理的逻辑分析以及试验验证能够得到一些结论的。在此基础上我们再去优化结构方案,来保证低成本和车规,这个是我们过去在做的事。目前跟客户也是不断去互动,不断去提升。
确实我们在目前看来,以及对未来前瞻性的判断,图像融合应该能够进一步提升感知层的综合性能,同时还能够兼顾车规、成本等关键的客户需求。
Question 04:您提出激光雷达3.0时代的概念,那么和大家畅想一下激光雷达4.0时代是什么样的?
我先挑战一下您的问题,因为终局这个概念很好。但是我想说的是,终局是一个思考问题的方式,而不是一个思考问题的结论,并不是一个答案。我们是长远的,更以终局的逻辑和心态去看待问题、分析问题。但是我一定要找到一个最终的解,这也不现实。所以终局也要定义好在什么范围内,在什么尺度下我们看终局是什么。您提到终局,我稍微对这个概念做一个回应。
关于本身3.0,目前我们是行业的先驱者,本身我们硬件级图像前融合这个技术也是业内独家的产品,未来我们任重而道远,需要相当长的时间去和用户共同探索如何上车,如何整合产业链,如何整合整个生态,去把不同的传感器去更好地融合在一起。
对于4.0,咱们朝更远的去看,这个角度绝对没有问题,但是今天要给出一个非常明确的答案还是非常困难的。我稍微探索性的畅想一下,也许会是一个更加广泛,更加广义的融合,这个也是一种可能,我们也许会增加更多的传感器在一起,也许会把补盲雷达,或者是主雷达、前向雷达都可以更好的集成到一个产品中,或者是一个硬件架构中,这可能是一个趋势。另外一个方向,我想到的可能是人眼和人脑一体化的感知系统,也许我们的传感器会更加智能化。我们的感知算力层面、算法层面,甚至是决策层面也会走向前端,会是一种更加智能化的方式去在前端解决很多决策的问题,或者是安全性的问题。我觉得大概有这样一些idea,但是下一代具体是什么形式还需要一些时间和工作跟行业一起去探索。



